RoboDIMM —The ING’s New Seeing
Monitor
Neil O’Mahony (ING)
A
brand new dome stands near the William Herschel Telescope, its white surface
reflecting the strong mountain sunshine. Inside is ING’s automatic seeing
monitor, RoboDIMM, which became operational in August last year. What was
announced as a project in the
March 2001
ING Newsletter, 4, 27, in an article by Thomas Augusteijn,
is now a fully functioning reality.
The Differential Image Motion Monitor, proposed by Sarazin and Roddier (
1990,
A&A, 227, 294) and based on a small telescope and relatively
inexpensive equipment, has over the last 10 years become the most common
seeing measurement method used in site testing and characterisation. Nowadays,
whether for control of image quality or to help decision making in queue
scheduling, DIMM-type seeing monitors have become an indispensable tool in
observatories around the world. The seeing has become just one more “meteorological”
datum that ground-based astronomy is expected to have at its fingertips.
This is why, in common with observatories in Chile and elsewhere, the ING
chose to replace its DIMM (1994–1999) with a new “robotic” DIMM. ING’s RoboDIMM
now fulfills its projected function, which was to make reliable seeing measurements
available throughout the night, requiring user intervention only for startup
and shutdown, and controlled remotely from the WHT control room.
RoboDIMM started observing in August 2002, to coincide with the first NAOMI
“science run” at the WHT. It sampled the seeing on 85 nights until December,
missing only 20% of nights, mostly due to poor weather. Around this time,
a fault with a telescope drive motor began causing significant down-time.
Now the motor has been replaced and RoboDIMM again accompanied the NAOMI
run of April 2003. It has continued in its routine job of seeing monitoring
throughout last summer without pause.
Installed atop a 5m tall tower (see
Figure 1), which
it inherited from the previous DIMM installation, RoboDIMM is built out of
a combination of off-the-shelf hardware items, with the vital addition of
custom-made software.

|
|
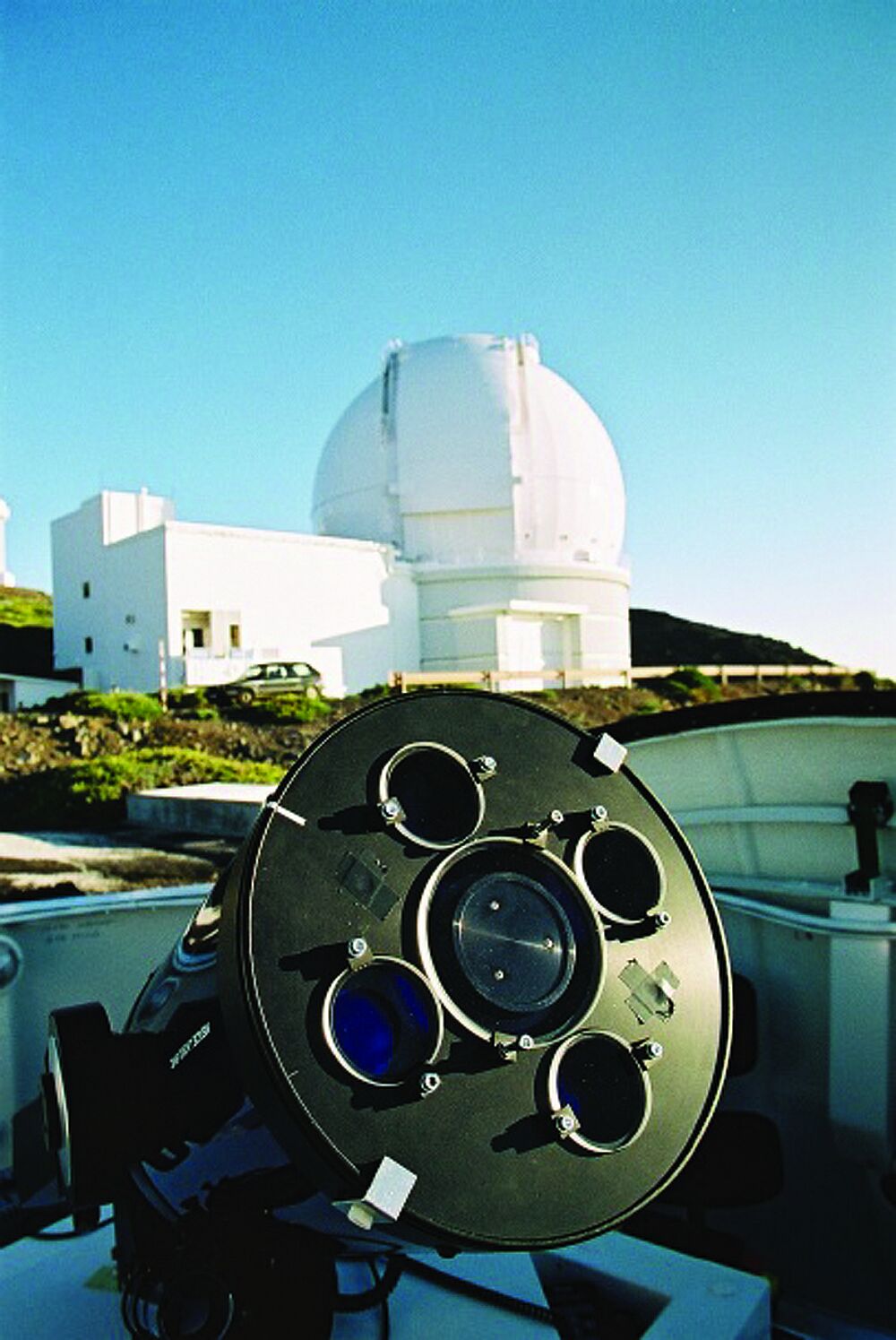
Figure 1 (left). RoboDIMM stands ready
at sunset for a night’s observation at the Roque de Los Muchachos observatory.
The dome is opened remotely from the WHT control room and the automatic observing
program is started. The tower, 5m tall, is located about 75m north of the
dome of the William Herschel Telescope, on a gentle slope facing unobstructedly
the prevailing winds. [ JPEG | TIFF ]
Figure 2 (right). The RoboDIMM telescope at polar park position,
with the WHT in the background. The entrance aperture forms 4 separate images
of the same star (the large central aperture is no longer used). The sub-apertures,
covered by optical wedges, are aligned along N/S and E/W (despite what the
perspective here may suggest). Both photos by R. Gorter of Startel.
[ JPEG | TIFF ]
|
The main commercially available components are a Meade12" Schmidt-Cassegrain
telescope (LX200 model), an ST-5C CCD from Santa Barbara Instruments (SBIG),
and a 12' diameter (3.7 metre) dome with motorised opening supplied by Astrohaven
in Canada. The other vital component, a mask that goes over the telescope
entrance aperture, was machined in-house, to which some specially ordered
small-deviation prisms (‘optical wedges’) were added.
It is worth mentioning some special properties of the tower, designed by
Dario Mancini of Capodimonte Observatory and used elsewhere at ORM and at
ESO’s Paranal Observatory. It consists of a vibration-proof central truss,
5.2m tall, upon which the telescope is mounted, and a second tower that surrounds
it and supports an “access platform”. In the case of RoboDIMM the latter
has been slightly widened to house the dome. The two structures are mechanically
independent, so that the telescope is isolated from vibration caused by wind
buffeting of the dome. When fully open, the dome presents a 1.5m-high barrier
to the wind, from which the telescope stands proud. Since ground layer heating
is significantly reduced at the height of the tower, we assume that the dome
induces minimal optical turbulence and has insignificant effect on the DIMM
measurements. The support struts allow the wind to flow around them, and
louvered ports in the dome floor open automatically, improving vertical airflow.
The control software was written for ING by Startel Ltd., in the Netherlands
(
http://www.startel.nl (Dutch language),
http://www.robodimm.com (in construction)).
It is a C++ program, running on a Linux-based PC, and controls all relevant
automatic functions: from choosing suitable targets and acquiring them, to
controlling the CCD, processing measurements and writing them to a database.
The telescope is commanded through a serial port connection to the PC, exploiting
a feature of the Meade LX200. The program runs a continuous sequence of tasks
but also allows user intervention and control of status and data quality
through a graphical interface.
Operation
At present the dome must be opened and closed by ING personnel, formally
the WHT Telescope Operator, from the control room of the WHT. This may be
automated in the future, and the upgrade to the telemetry system that this
would require is being considered. We may then be able to implement automatic
closure in response to adverse weather conditions.
The control program can be left running permanently, because it automatically
stops observing at sunrise and will automatically start again around the
following sunset, depending on the brightness of available targets. This
lightens the workload on the TO at the beginning of the night and helps to
provide an early seeing estimate, sometimes even before the sun has gone
down! Such an early estimate has clear applications in queue observing. If
a seeing measurement is available over the previous 5 minutes, it is published
on the ING Weather Station Web page, (
http://www.ing.iac.es/ds/weather/).
A graph of the night’s data is also publicly available (at night time) through
the Weather Page, as is the full set of archived data (or see
http://www.ing.iac.es/ds/robodimm/).
The chosen target is the brightest available star within 30 degrees of the
zenith, in a magnitude range of 2 to 4, although brighter stars can be used
in cloudy conditions. The acquisition field is almost 4×3 arc minutes,
but if no star is found in the first CCD image taken at the target position,
the program starts a search spiral. In clear conditions this usually results
in a successful acquisition within a few minutes. Once the star is near enough
to the centre of the CCD, the pointing offset of the telescope is updated,
the readout is windowed and a series of 200 images with 10ms exposure is
taken. After this, there is a brief pause while the standard deviation of
the images’ relative positions is measured and the FWHM is calculated from
this. The program then repeats the sampling and measurement cycle to provide
continuous monitoring, moving to a new star when the observing elevation
goes below 60 degrees.
A seeing measurement is made at irregular intervals of approximately 2.5minutes,
and most of that time is spent taking the 200 images in the sample. This
is a much longer duty cycle than the original ING DIMM, but it may be possible
to speed this up in future by customising the firmware on the CCD controller.
We estimate a further 20% of operative time for which no measurement is available
due to miscellaneous overheads, which may be improved upon. The software
is now fully functional with small improvements continually being added,
in close collaboration with the software authors, Startel.
Interpretation
RoboDIMM forms 4 images of the same star (see
Figure 2),
measuring image motion in two orthogonal directions from each of the two
pairs of images, from which it derives 4 simultaneous and independent estimates
of the seeing. When the system is correctly set up, these 4 measurements
should agree, over a reasonably sized sample. We find that relative sizes
vary from night to night and show a noticeable sensitivity to the focus position
of the Meade telescope, which has been observed to flop after a telescope
slew. At present the focus has to be adjusted by user command using an electronic
focuser mounted above the CCD, but we are investigating whether to fix the
focus mechanically or make automatic adjustments in the future.
The measurement published on the Weather Page is the average of 4 simultaneous
database entries, and users should be aware that this page is compiled using
data from up to 5 minutes prior to the posted time. Up-to-date and individual
measurements can be viewed by following the ‘Seeing’ link on the Weather
Page. The database values are automatically corrected for the observing zenith
distance (dividing by airmass to the power 3/5) and a wavelength of 550nm
and the time listed is that at the middle of the sample. The four instantaneous
values can differ by, say, 20%, but what matters is that there should be
no significant long term difference.
The general impression is that the average seeing published on the Weather
Page agrees reasonably well with seeing being obtained at the William Herschel
Telescope, including NAOMI and Richard Wilson’s “Slodar” wave front sensors
(see article on
page 19), and with that obtained
at other telescopes. It has shown sensitivity to all seeing conditions, registering
averages as low as 0.35" and (during the passing of a warm front) as high
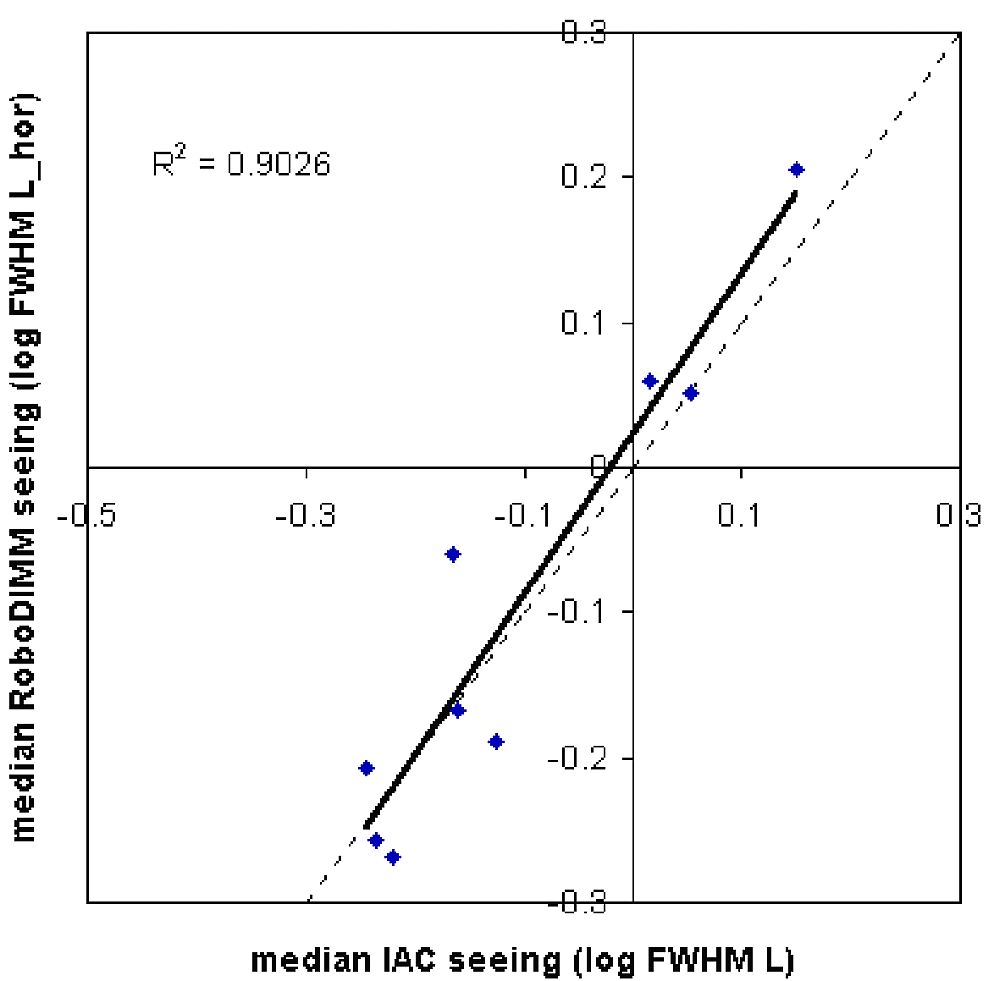
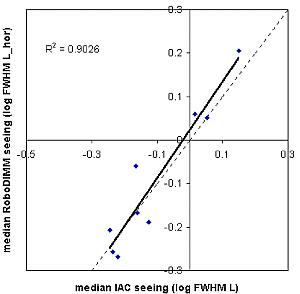
as 7"! A comparison with seeing data from the IAC DIMM (provided by the Sky
Quality Group at the Instituto de Astrofísica de Canarias), using
simultaneous samples of several hours length from 9 nights in October 2002,
shows a 91% correlation (see
Figure 3) between the
seeing FWHM measurements made at the two instruments. The differences between
the median values is scattered around
y =
x by an amount varying
between 3 and 15% on any given night, or about 8% on average. This average
discrepancy is no larger than the internal error of either instrument. The
good agreement exists in spite of the large distance between the two monitors
(several kilometres), the factor 10 difference between their sample duty
cycles and their independent designs. Periods of rapidly fluctuating seeing
were generally excluded from the samples used in this comparison, to
avoid possible local effects.
|
Figure 3. A scatter plot of the seeing FWHM measured
by the IAC DIMM as a function of simultaneous RoboDIMM seeing. The best fit
line, close to y=x, and the large correlation coefficient (0.91) illustrate
the close dependence of these two variables. Each of the 9 points represents
the median seeing from simultaneous samples formed by a continuous period
of stable seeing lasting several hours. The logarithmic scale is necessary
to convert seeing FWHM into an approximately normally distributed variable.
[ JPEG | TIFF ]
|
While this result is encouraging and allows a good deal of confidence in
RoboDIMM’s seeing measurements, it is not conclusive, since no median below
0.6 arc seconds was used. Calibration of RoboDIMM is ongoing, including characterisation
of intrinsic errors and comparison with other seeing monitors such as NAOMI’s
Wave Front Sensor.
As regards hardware components, ING’s RoboDIMM bears a close resemblance
to the CTIO’s automatic seeing monitor (which, incidentally, is also called
RoboDIMM, but the originality of that name is disputable! See
http://www.ctio.noao.edu/telescopes/dimm/dimm.html).
There is an important difference in that the CTIO’s takes samples alternating
between 5 and 10ms exposure time. This forms two samples from which the image
motion at “zero seconds exposure” is extrapolated, following the method established
by ESO in its Chilean seeing monitors. The zero-second seeing may reportedly
be 10 – 20% larger than the 10ms estimate (
A.
Tokovinin, 2002, PASP, 114, 1156), depending on the speed
and altitude of turbulent layers. When comparing results from different sites,
it is important to bear instrumental differences in mind but we should also
remember that the strength of the exposure time “blurring” effect may differ
greatly between sites, as well as vary over time.
Conclusion
With the commissioning of the RoboDIMM seeing monitor, ING has provided its
Adaptive Optics programme with an important auxiliary instrument. It provides
a seeing FWHM estimate at regular intervals that can be relied upon to within
about 10% in stable conditions. RoboDIMM allows NAOMI performance to be monitored
in real time, and also provides essential information for AO observing in
queue mode. Additionally RoboDIMM provides all telescopes on site with data
that can help astronomers to optimally adjust telescope and instrument focus.
It allows them to make sure they are fully availing of the superb natural
seeing available at the Observatorio del Roque de los Muchachos.
¤
Email contact: Neil
O’Mahony (
nom@ing.iac.es)