 | |||
|

| Home > Astronomy > Site Quality > Atmospheric Seeing at ING > RoboDIMM Hardware Components |
Hardware Components of RoboDIMM
RoboDIMM is an automatic monitor, measuring the atmospheric seeing
throughout the night with minimum human intervention. It is a DIMM-type
seeing monitor, i.e. using the Differential Image Motion technique. It is built mainly of items available
on the consumer market, with the crucial addition of custom-made software. The following are the generic hardware
components considered "essential" for an automatic seeing monitor, listed
roughly in order of cost:
These items are discussed in detail below, describing the particularities of their installation, operational characteristics, advantages, disadvantages, and alternatives. It is essential to elevate the point of measurement
above the strongest component of ground-layer turbulence, which we we do
not wish to contribute to the measurement of the seeing. On a high altitude
mountain site such as the ORM (Roque de los Muchachos observatory) this
ground layer turbulence is considerably weaker than at sea level, but it is
still generally considered necessary to measure seeing at a minimum height
of a few metres above local ground. The height of the RoboDIMM inner tower
(see below) is 5.2m, while the telescope mount raises the entrance aperture
almost 1m higher. The advantage of a tower over a building
rooftop is that it locates the monitor well away from local wind vortices which might
affect the accuracy of the measurements. Although the DIMM technique
tolerates a small amount of buffeting of the instrument, it is important
that the support structure be resistant to vibrations. The RoboDIMM tower
has some special properties in this regard.

The tower is made up of an inner
vibration-proof truss and a surrounding, independent platform on which
an operator can stand and which supports the dome. (The dual structure can
be seen in the photo, left). The truss has a Serrurier-type structure designed
to provide maximum stability in the presence of wind (<0.02 arcsec movement
at 50 km/h windspeed) for the telescope which is bolted on top. The access
platform is a more conventional structure that stands completely independently
of the truss, joined to it only by a waterproof canvas at the top. Thus,
although the access platform may be susceptible to vibration caused by the
wind or the presence of an operator, none can transmit to the telescope.
The tower's supports form a completely open structure
through which the wind blows. Originally, the platform floor was also an
open grille, but since the installation of the dome this has been sealed,
except for three louvred ports (visible in the above photo as rectangular
structures under the platform to the right and left). These open automatically
during observation and cover perhaps 50% of the floor space, improving
ventilation considerably. Access to the dome is through a trap-door via
a permanent step-ladder. RoboDIMM's tower was installed for the previous DIMM,
in 1994, and only required minor adaptation to accomodate the new monitor
and dome. It is located to the north and east of the WHT, at a distance
of some 75 metres from the telescope building. It has a clear and unobstructed
view over the steep convex northern side of the mountain, which is where
the prevailaing trade winds come from. It stands on ground some 3m below
the earthwork platform on which the WHT facility is built. This location was
largely determined
by the local rock type. The slope of the terrain can be seen in the photograph
(left), allowing for perspective distortion. There are at least 3 other
similar towers on the ORM site as a result of various DIMM installations
carried out by the IAC and the Telescopio Nazionale Galileo.The tower was
originally designed for use with a DIMM by Dario Mancini for Capodimonte
Observatory in Italy. It costs in 1995 prices, some EUR 30,000 including
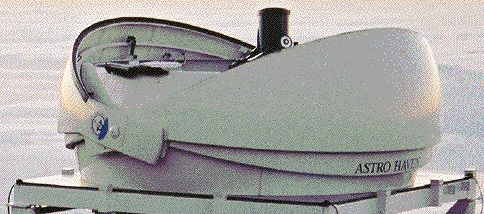
installation. The telescope must somehow be protected from the
elements, so that some kind of enclosure becomes essential. In order to
be autonomous, the RoboDIMM required a motorised hard-shell enclosure and
ING opted to buy a dome on the amateur astronomy market. Following an
internet search in 2000, a non-rotating clamshell domes from Astrohaven
(Canada) was identified as a good off-the-shelf option. There is a company producing a mini-dome
covering just the telescope, but this does not allow the monitor to stand
in the open air during measurement.
ING purchased a 12 foot diameter (3.7m) dome which
improves ventilation when open and gives extra space for working inside the
dome. Belt-drive motors for opening and closing were purchased from the same
supplier and installed by ING. The "clamshell" roof has four segments which
slide down, under motor power, until they are almost
flush with the base, which thus leaves a ring shaped wall of 1.5 to 1.6m tall
all around. This presents a solid barrier to the wind, producing a turbulent
wake which, in the presence of a heat source, would contribute to the RoboDIMM
measurement. However, temperature gradients are expected to be minimal and
ventilation is helped by floor panels that open up, so that such contributions
are thought unlikely. In any case the telescope stands above the height of
this barrier (as seen in photo above) and is exposed to the wind. Indeed
on nights when windspeed rises above approximately 40 km/h, the telescope
is clearly buffeted, and the image centroids move so much that some samples
are discarded by the program. In this case the
clamshell dome, by partially closing it, provides a useful wind shelter
and allows measurements to continue without interruption. However the Astrohaven dome does not satisfactorily
exclude humidity when closed. While the dome shutter does indeed appear
immune to rain and completely drip-proof, there are some significant gaps
between the segments and the base. Conditions on the ORM in winter can
be quite demanding, with high winds and fog pushing humidity inside the
Robo-Dome to over 95% for days on end. When this happens, extra precautions
are taken with electrical equipment (power down and/or dehumidification).
Since 1994, we have experienced no electrical problems in DIMM equipment
due identifiably to humidity. The RoboDIMM telescope is a Meade LX200 (non-GSM model) with 30.5cm (12")
entrance aperture. An aperture much smaller than this is inviable because
a DIMM requires a minimum spatial baseline to sample the wavefront distortion.
The main capabilities of this model availed of by RoboDIMM are PC control
of slewing through an RS232 serial link and its reasonable pointing accuracy.
The telescope is mounted in equatorial mode which is more convenient for
observing near the zenith. This involves installing the telescope
on a "wedge" or adjustable angled mount (purchased separately) and choosing
the "Polar" mode in the LX200 software.
The telescope is normally left powered on permanently,
since on power up, the Dec "worm" drive (or infinite thread) is automatically
moved in order to enter into contact with the gear wheel. The amount moved is
unpredictable, which means that an operator must correct the pointing on
the first target using the finder telescope. Since it's permanently powered up, special precautions
must be taken to ensure that the telescope does not continue tracking during
daytime. RoboDIMM is protected from this by software both in the LX200 and
in the custom control program with the addition of tilt-sensitive
limit switches that cut out power as a fail-safe. The main disadvantage of this telescope, and
of "amateur" telescopes generally, is that the mechanics of the rotation
axes are rather lightly built (some gear parts are plastic and the motors
are reminiscent of toy cars). This makes them more vulnerable to mechanical
wear and makes local repairs to most mechanisms more difficult. After only
4 months of service, the entire drive unit (control electronics + motor)
for the RA axis was replaced, due to a fault that was probably electronic
in origin. Fortunately this was diagnosed as a common fault (i.e. not caused
by inappropriate use) and a replacement quickly supplied.
Another disadvantage of the light build is flexure,
most noticeably in that the primary mirror tilts during tracking and flops
considerably during slewing. This has been observed to stretch the multiple
image by up to 15% following a slew, which probably alters the image scale
and thus the accuracy of the FWHM estimate. In response, automatic compensation
of the focus error has been introduced (see Focuser)
and mechanical fixing of the primary mirror position is being considered. Reportedly, the new version of the Meade LX200, with
GSM, is more mechanically robust, but also considerably more expensive. Whereas the previous ING DIMM had an intensified
MCP camera, CCDs are nowadays a much more realistic and preferable alternative
than they used to be. However, a video-type, interlaced readout should
most definitely be avoided as it affects positional measurements. ING purchased
an ST-5C camera from SBIG (Santa Barbara
instrument Group). This has 320 x 240 pixels with 10x10 micron size and
is thermoelectrically cooled. This model is now obsolete and has been superseded
by new SBIG products with more and smaller pixels.
Pixel scale in our setup has been measured (using
a binary star) at 0.72 arcsec per pixel, giving a field size of nearly
4 x 3 arcminutes. The pointing of the Meade telescope is accurate enough
to acquire the star within a square of 3x3 such fields almost all of the
time. The original firmware is used on this CCD, which gives a minimum exposure time of 10ms. It may be possible to push the minimum exposure time to 5ms by altering the firmware. During a sample of image motion, a sequence of 200 images is taken, reading out a single window of typically 60x60 pixels. A desktop PC provides all the processing power required
by the different tasks RoboDIMM has to perform, through the custom-made software and data links to the telescope
and CCD controller. No special video cards were required for the SBIG
camera. The PC uses the Redhat Linux OS and is connected to the ING network
through an optical fibre link to the WHT building. The operator connects
to the PC by remote login and can control the monitor program through a command
line (telnet) interface. Usually, an terminal compatible with X11 graphics (linux or SunOs)
is available,
and the system can be commanded and monitored via a graphical user interface.
Some DIMM designs may prefer portable computers
while others may be considering using
computers specially prepared for outdoor use, etc. From our experience with
the previous DIMM installation (1995-98), we can say that a conventional
desktop PC, once powered down, seems to be robust enough to endure conditions of high
humidity (95%) and temperatures around freezing for days on end, with only
an ordinary metal cabinet for protection. The heat generated by the working PC is an unwelcome
guest in the clamshell dome and it would be preferable to house it outside.
Its distance from the telescope and CCD controller is limited by the maximum
length of the data cables, RS232 and USB repecively. This distance may be
increased using low-impedance cables. As a PC monitor, one might consider
a 15 inch TFT instead of a CRT-type monitor, not because of the smaller
amount of heat it generates (the monitor is usually switched off), but because
it is lighter and easier to transport to and from the observing tower. This is a device mounted between the telescope Cassegrain
port and the CCD which, through a small electronic motor, allows the spacing
between these to be adjusted. It is a conventional device available on
the amateur market and is controlled, via a cable to the (Meade) telescope,
by computer command. It may seem an unnecessary addition given that the
telescope focus can already be adjusted via a screw-handle which moves the
primary mirror. This mecahanism, while common in Celestron and Meade telescopes,
actually causes the mirror to tilt slightly because the screw is attached
at only one point. There is also considerable play in the mechanism, causing
the mirror position to "flop" during slewing or even tracking. Therefore
computer control of the telescope focus becomes essential in an automatic
seeeing monitor.
A DIMM works by forming at least two images
of the same star in order to measure the differential motion between them.
Perhaps the most convenient way to form multiple images is to cover the
telescope entrance pupil with a sub-aperture mask fitted with an optical
element that introduces a small deviation into the beam.
RoboDIMM has a mask with four such subapertures, as
illustrated in the schematic figure below (blank circles). It is machined
from an aluminium plate and weighs about half a kilogram. The central aperture
in the figure is now covered. Each sub-aperture in RoboDIMM is fitted with a small-deviation
prism, i.e. a glass plate with a small angle between its faces (about half
a degree). This introduces a small angular deviation into the light beam
entering the telescope, resulting in a multiple image when the telescope
is in focus. The (circular) prisms are rotated to obtain a cross-shaped image
and the mask is rotated to align its axes with the rows and columns of the
CCD. (The CCD is previously aligned with RA and Dec on sky). The telescope
focus is adjusted to give equal distances between the sellar images accross
the two axes of the cross. |

| Top | Back |
|
{kind=link}