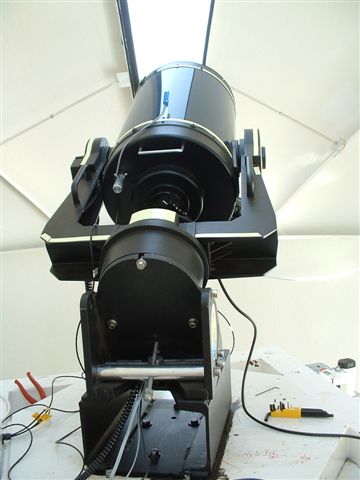
El Telescopio Meade tiene 3 safety limites de Mercurio, que estan ajustado
de manera que no se interrumpan durante el funcionamiento automatico .
En el caso de que uno de estos safety limites se active, estos apagaran
el Telescope Power y habra que ir a la torre para hacer un RESET LIMITS,
el modo de proceder, es sacar manualmente el telescopio de esa posicion
y aparcarlo en su posicion de PARK HA=0 DEC=28.7 (cenit), ahora ya se puede
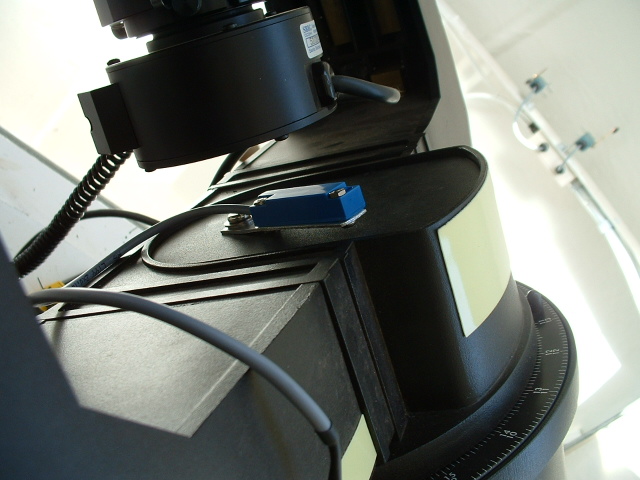
pulsar el boton RESET LIMITS. El safety limits box, tambien tiene un switch
que se puede override los limits, este se usaria en la torre en el caso
de alineamiento o en alguna otra prueba. hay tres pulsadores marcados con
TEST N S y TEST HA, estos switches no deben ser operados, porque que se activaria
el safety limits box que apaga el telescope power, solamente se pueden usar
en modo de override.
Una oscilacion no deberia activar estos interruptores de mercurio ellos
estan conectado a un delay de 400 mileseconds espero que sea suficiente.
You need to do all this from the Robodimm tower!
1)-Before you run the program park the telescope at zenith.
2)-Run the robodimm like ./robodimm -m and ./ru, this doesn´t start the automatic robodimm procedure, otherwise use STOPROBOT.
3)-Issue the following commands:
selecttarget 30
it makes life easier loading very bright stars:
importsao -1 2
selecttarget 3
now put telescope in tracking mode:
resume
send the telescope now to a star:
goto saoxxxx
4)-You should now be able to centre the star on the finder-"cross hair"
At the same time run ./snapper from /data/robodimm/robodimm and
follow the prompt. This opens a TV display so you can search
and centre it on the CCD.
When this is done issue the command:
sync saoxxxx
.... this should fix the pointing problem.
Also if you know one star you can go there and sync RA and DEC, where
RA&DEC are the apparent coordinates of the target that you are pointing,
use the format hh:mm:ss dd:mm:ss:
Example: sync 12:00:00 28:00:00
5)-Now exit from the ./snapper with ctrl-C and then type startrobot.
If it is working exit from the two windows and run the program from the control room.
Carlos Martín
{kind=link}
{kind=link}
{kind=link}
{kind=link}